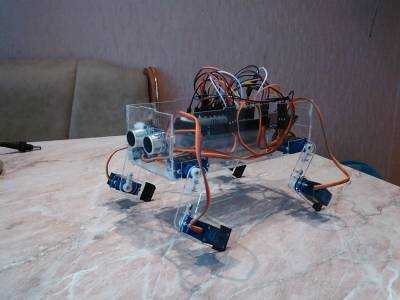
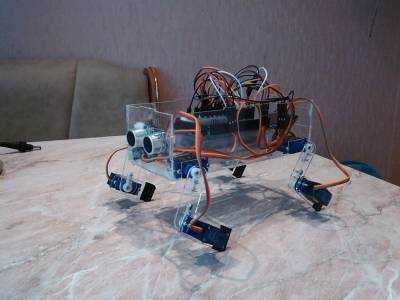
Хочу показать и рассказать о своем первом самодельном роботе Z-RoboDog. Также поделится всеми материалами, чертежами и файлами, используя которые вы сами сможете собрать такую собачку. Данный робот может ходить вперед, и останавливаться перед препятствиями. Возможно в будущем добавлю дополнительные сервоприводы и ступни. Ну, а сейчас выкладываю всё, что сделано в данной версии.
Z-RoboDog - это мой первый эксперимент по созданию роботов. Всё придумывал и делал самостоятельно. В первую очередь проект должен был быть максимально недорогим. Корпус создавал без всяких расчетов и балансировки, основное требование - минимальные габариты. Итак давайте посмотрим как собирается этот робот и что он может.
Что вам понадобиться для сборки Z-RoboDog:
1. Набор деталей корпуса и лап из оргстекла 1.5 мм.2. Arduino Mega или Uno (используется Mega) - 1 шт.3. Микро сервопривод (используются TowerPro SG90) - 8 шт.4. Ультразвуковой дальномер HC-SR04 - 1 шт. 5. Аккумулятор размером 18560, 3.7V (используются TrustFire 2400 mAh) - 2 шт.6. Держатель батарей размера 18560 (используется переделанный контейнер - упаковка) - 1 шт.7. Стойка для печатной платы 25 мм. (используется вот такие стойки) - 4 шт.8. Часть макетной платы.9. Провода-перемычки.10. Винт DIN 7985 M2, 8 мм. - 18 шт.11. Гайка DIN 934 M2 - 18 шт.12. Шуруповерт или дрель.
Сборка робота Z-RoboDog:
1. Корпус робота изготовлен из прозрачного оргстекла толщиной 1.5 мм. Все детали вырезаны лазером по чертежу сделанном в программе CorelDraw

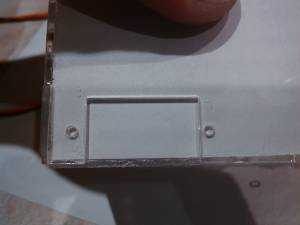
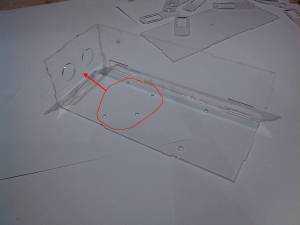
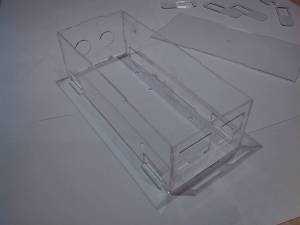
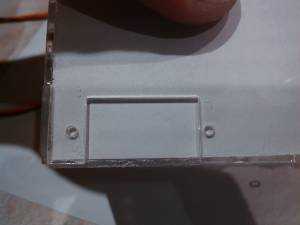
2. Склейте корпус секундным клеем. Прочности склеенного корпуса будет вполне достаточно. При сборке учитывайте положение отверстий на нижней крышке (смотрите на фото), а лучше приложите плату и убедитесь что всё совпадает. Боковые стенки крепите так, чтобы отверстия для проводов находились ближе к задней стенке. Более широкое отверстие на задней стенке предназначено для USB провода, учтите это при сборке.
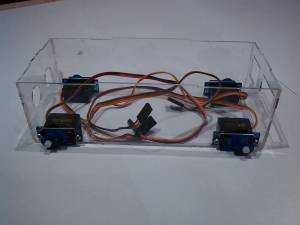
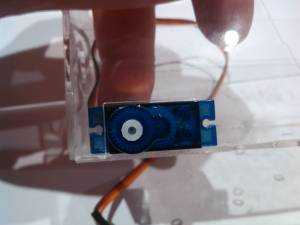
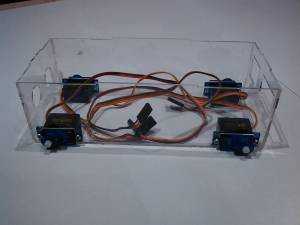
3. Отметьте и просверлите отверстия (сверло 2 мм.). Закрепите сервоприводы в корпусе используя болты и гайки (пункты 10, 11 из списка). Валы передних сервоприводов должны быть ближе к передней стенке. Валы задних сервоприводов ближе к задней стенке.

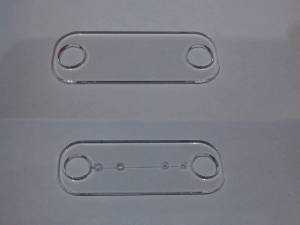
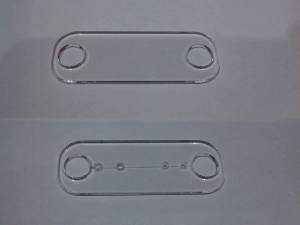
4.1. Соберите лапы. Возьмите верхние части лап (с двумя отверстиями). Разметьте середину детали. Подставив качалку сервоприводов отметьте места крепления шурупами и просверлите отверстия (сверло 1.5 мм). Закрепите качалки так, чтобы шляпки шурупов были со стороны посадочных мест. Качалки закрепите с разных сторон и посадочные места для валов до были в противоположном направлении.

4.2. Отметьте и просверлите отверстия для крепления сервоприводов (сверло 2 мм). Валы закрепленных сервоприводов должны находиться ближе к узкому краю лапы.


4.3. Чтобы лапы не проскальзывали наклейте на них например резину. Но переднюю часть лапы заклеивать не стоит, при шагах собачка может зацепляться и застревать. Я наклеил полосочки липучего коврика из машины.
5. Отметьте и просверлите отверстия для крепления ультразвукового дальномера (сверло 2 мм). Установите дальномер, ножки контактов должны быть направлены вверх.

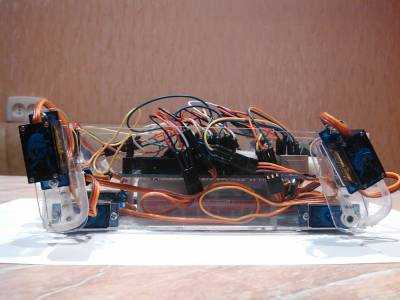
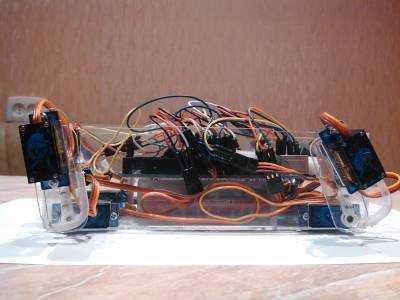
6. Установите держатель батарей так, чтобы в корпусе он располагался по середине. Закрепите плату Arduino и подключите все компоненты. Для разветвления питания использовалась часть макетной платы.
Настройка и запуск робота Z-RoboDog:
На этом этапе вам придется самостоятельно установить лапы, чтобы можно было откалибровать шаги. Основная проблема в качалках, которые крепятся на валы только в определенных положениях. А также сами сервоприводы могут отличаться рабочими градусами.
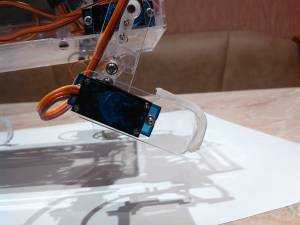
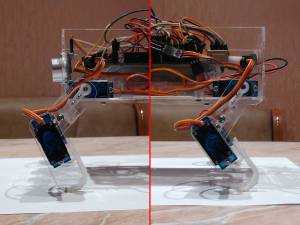
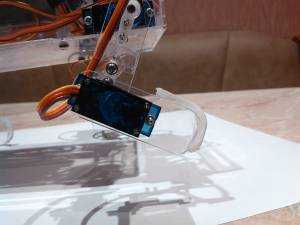
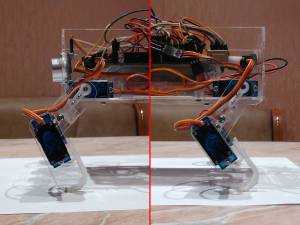
Вот как у моей собачки выглядят лапы в крайних точках углов сервопривода (переменные zs1, zs2, zs3 и т.д). Постарайтесь лапы выставить как на фото. Визуально лапы должны быть в одинаковых положениях.
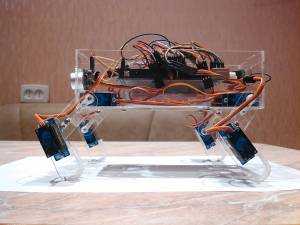
В основной стойке вы так же сможете выставить лапы. После чего не забудьте прикрутить качалки к валам сервоприводов.
Программная часть Z-RoboDog:
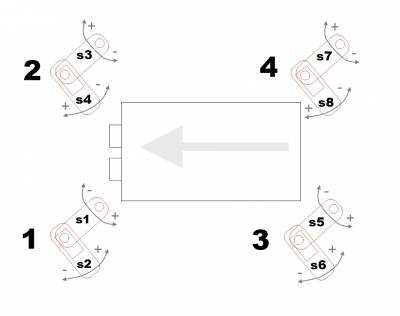
Код очень простой, везде добавлены комментарии. Все движения находятся в массиве, чтобы не запутаться в цифрах я использовал переменные для каждого сервопривода. Например, s1 - сервопривод 1, s2 - сервопривод 2 и так далее. Для упрощения понимания предлагая вам вот такую схему.
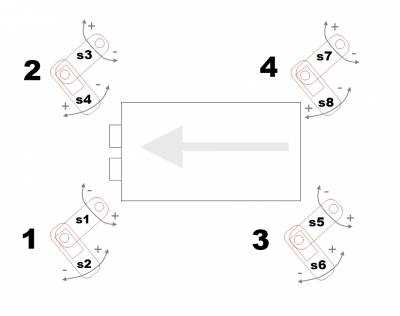
На схеме пронумерованы лапы, каждая часть лапы ассоциируется с сервоприводом который её двигает. Также для каждой лапы указаны направления движения, знаки плюс и минус указывают куда будет двигаться лапа при увеличении или уменьшении угла. Исходными углами выбраны углы основной стойки (s1, s2, s3 и т.д.). Например если вам нужно вытянуть 2-ю лапу вы должны увеличить угол s3 и s4, в массиве это будет выглядеть так {s1,s2, s3+100,s4+50, s5,s6, s7,s8}. Вот полный скетч. Код писался в силу моих познаний, сообщите если я выбрал не правильный путь реализации.
Все файлы проекта Z-RoboDog:
Чертеж деталей робота, файл z-robodog_2_4_7_se.cdr в архиве СКАЧАТЬЧертеж деталей робота, файл z-robodog_2_4_7_se.pdf в архиве СКАЧАТЬСкетч, файл Z_RoboDog_v2_4_07_Stabil.ino в архиве СКАЧАТЬ
mikrobord.do.am
Z-RoboDog - это мой первый эксперимент по созданию роботов. Всё придумывал и делал самостоятельно. В первую очередь проект должен был быть максимально недорогим. Корпус создавал без всяких расчетов и балансировки, основное требование - минимальные габариты. Итак давайте посмотрим как собирается этот робот и что он может.
Что вам понадобиться для сборки Z-RoboDog:
1. Набор деталей корпуса и лап из оргстекла 1.5 мм.2. Arduino Mega или Uno (используется Mega) - 1 шт.3. Микро сервопривод (используются TowerPro SG90) - 8 шт.4. Ультразвуковой дальномер HC-SR04 - 1 шт. 5. Аккумулятор размером 18560, 3.7V (используются TrustFire 2400 mAh) - 2 шт.6. Держатель батарей размера 18560 (используется переделанный контейнер - упаковка) - 1 шт.7. Стойка для печатной платы 25 мм. (используется вот такие стойки) - 4 шт.8. Часть макетной платы.9. Провода-перемычки.10. Винт DIN 7985 M2, 8 мм. - 18 шт.11. Гайка DIN 934 M2 - 18 шт.12. Шуруповерт или дрель.
Сборка робота Z-RoboDog:
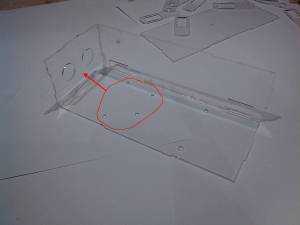
1. Корпус робота изготовлен из прозрачного оргстекла толщиной 1.5 мм. Все детали вырезаны лазером по чертежу сделанном в программе CorelDraw (скачать файл z-robodog_2_4_7_s.cdr).
 На фотографии детали с защитной пленкой голубого цвета.
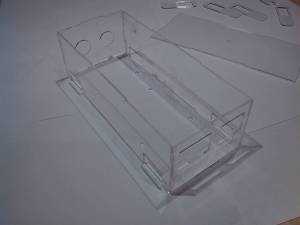
На фотографии детали с защитной пленкой голубого цвета.2. Склейте корпус секундным клеем. Прочности склеенного корпуса будет вполне достаточно. При сборке учитывайте положение отверстий на нижней крышке (смотрите на фото), а лучше приложите плату и убедитесь что всё совпадает. Боковые стенки крепите так, чтобы отверстия для проводов находились ближе к задней стенке. Более широкое отверстие на задней стенке предназначено для USB провода, учтите это при сборке.
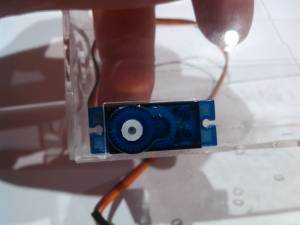
3. Отметьте и просверлите отверстия (сверло 2 мм.). Закрепите сервоприводы в корпусе используя болты и гайки (пункты 10, 11 из списка). Валы передних сервоприводов должны быть ближе к передней стенке. Валы задних сервоприводов ближе к задней стенке.

4.1. Соберите лапы. Возьмите верхние части лап (с двумя отверстиями). Разметьте середину детали. Подставив качалку сервоприводов отметьте места крепления шурупами и просверлите отверстия (сверло 1.5 мм). Закрепите качалки так, чтобы шляпки шурупов были со стороны посадочных мест. Качалки закрепите с разных сторон и посадочные места для валов до были в противоположном направлении.

4.2. Отметьте и просверлите отверстия для крепления сервоприводов (сверло 2 мм). Валы закрепленных сервоприводов должны находиться ближе к узкому краю лапы.


4.3. Чтобы лапы не проскальзывали наклейте на них например резину. Но переднюю часть лапы заклеивать не стоит, при шагах собачка может зацепляться и застревать. Я наклеил полосочки липучего коврика из машины.
5. Отметьте и просверлите отверстия для крепления ультразвукового дальномера (сверло 2 мм). Установите дальномер, ножки контактов должны быть направлены вверх.

6. Установите держатель батарей так, чтобы в корпусе он располагался по середине. Закрепите плату Arduino и подключите все компоненты. Для разветвления питания использовалась часть макетной платы.
Настройка и запуск робота Z-RoboDog:
На этом этапе вам придется самостоятельно установить лапы, чтобы можно было откалибровать шаги. Основная проблема в качалках, которые крепятся на валы только в определенных положениях. А также сами сервоприводы могут отличаться рабочими градусами.
Вот как у моей собачки выглядят лапы в крайних точках углов сервопривода (переменные zs1, zs2, zs3 и т.д). Постарайтесь лапы выставить как на фото. Визуально лапы должны быть в одинаковых положениях.
В основной стойке вы так же сможете выставить лапы. После чего не забудьте прикрутить качалки к валам сервоприводов.

Программная часть Z-RoboDog:
Код очень простой, везде добавлены комментарии. Все движения находятся в массиве, чтобы не запутаться в цифрах я использовал переменные для каждого сервопривода. Например, s1 - сервопривод 1, s2 - сервопривод 2 и так далее. Для упрощения понимания предлагая вам вот такую схему.
На схеме пронумерованы лапы, каждая часть лапы ассоциируется с сервоприводом который её двигает. Также для каждой лапы указаны направления движения, знаки плюс и минус указывают куда будет двигаться лапа при увеличении или уменьшении угла. Исходными углами выбраны углы основной стойки (s1, s2, s3 и т.д.). Например если вам нужно вытянуть 2-ю лапу вы должны увеличить угол s3 и s4, в массиве это будет выглядеть так {s1,s2, s3+100,s4+50, s5,s6, s7,s8}. Вот полный скетч. Код писался в силу моих познаний, сообщите если я выбрал не правильный путь реализации. Посмотреть код можно тут Z_RoboDog_v2_4_07_Stabil.ino.txt
Видео проекта Z-RoboDog:
Все видео можно посмотреть тут: плейлист Z-RoboDog
Все файлы проекта Z-RoboDog:
Чертеж деталей робота, файл z-robodog_2_4_7_se.cdr в архиве СКАЧАТЬЧертеж деталей робота, файл z-robodog_2_4_7_se.pdf в архиве СКАЧАТЬСкетч, файл Z_RoboDog_v2_4_07_Stabil.ino в архиве СКАЧАТЬ
Оцените Материал!
Понравилась запись? - поставь лайк.
Это может быть вам интересно:robocontroller.ru
Симона Гёрц, «Королева бесполезных роботов», продолжает удивлять мир своими странными и откровенно курьезными изобретениями. Ее новый питомец — жуткий гибрид плюшевой собаки и механического шагохода.
Василий Макаров
9 сентября 2016 09:30

Несмотря на очаровательную плюшевую голову щенка, робо-собака выглядит скорее не милой игрушкой, а кошмарным персонажем из какого-нибудь научно-фантастического фильма ужасов. Впрочем, питомец весьма безобиден и даже бесполезен: несмотря на то, что каждую его ногу питает отдельный сервомотор (что, по признаниям самой изобретательницы, является перебором), собака едва может удерживать вертикальное положение и неизбежно падает навзничь в попытках двигаться, забавно дрыгая в воздухе стальными суставчатыми лапами.
www.popmech.ru
Pragueratter | Все права защищены © 2018 | Карта сайта