Куда бегут собаки (КБС). Бегут собаки
КБС










The project was shown at the exhibition “Scientific Museum in the XXIst Century” in the Ural Branch of NCCA from February 20 to March 16, 2013; from March 22 to April 12 in Samara; also at the “Zero Gravity” exhibition from September 10 to October 15, 2013 (curated by Elena Selina), which was a part of the special project of V Moscow Biennale of Contemporary Art. “Trialogue” project brought the artists an award of Dmitry Zimin’s “Dynasty” fund.
Three white balls in the field of snow. The balls are robots capable of autonomous and coordinated movements. They are exchanging information about their reciprocal positions and are using as a motion equation the law which is qualitatively analogous to the gravity law. The balls are attracted and repulsed depending on the space between them and their mass. They are moving not as point masses ready to turn in any moment, but as vectored points. This is a mathematical model of three-body system. It is impossible to predict their trajectories over the long period of time. To a purely mathematical model we are adding its physical embodiment; as a result, we have a multitude of not accounted for and non-foreseeable parameters, such as field irregularities, patches of clinging snow, mechanical control imprecisions etc. These new parameters make it impossible to predict the robots’ movements even one minute ahead.We can only watch developments and sudden changes in relationships between them.Through video, we are capturing the process of incessant calculations which is chaotically changing mutual trajectories of the balls. Having created the system, we cannot control it. We can only serveas physical inaccuracies influencing the current mathematical operation; at the same time we don’t know how exactly we are influencing these calculations. We renounce control and accept the impossibility of control. This is an autistic system, close-looped to endlessly calculate itself.
Musiccreated on the notes depicted at "The Garden of Earthly Delights" by Hieronymus Boschplayed by "Vox Vulgaris" (disk "The shape of medieval music to come", 2003)
Project was realized with the support of Dynasty Foundation (Moscow) and the Ural Branch of National Center of Contemporary Art
CuratorSvetlana Usoltseva
ProgrammingDenis Perevalov
Scientific AdvisersViktor Orlov,Saint-Petersburg State University, physicsVladimir Surdin,The Sternberg Astronomical Institute (Moscow), physics
Computer simulation of three-body problemEugene Butikov,Saint-Petersburg State University, physics
Voice OverPetr Vinokurov
Thanks to Roman Plotnikov, Marina Sokolovskaya, Alisa Prudnikova, Ksenia Zhidelyova, Daria Parkhomenko, Stanislav Stankovskiy, Artem Korzukhin
Where dogs run. 2013

Три белых шара в снежном поле. Шары – роботы, способные двигаться автономно и согласованно. Они обмениваются информацией о взаимном положении в пространстве и используют в качестве уравнения движения закон, качественно аналогичный закону гравитации. Шары притягиваются и отталкиваются в зависимости от расстояния между ними и массы их тел. Они движутся не как материальные точки, готовые повернуть в любой момент, а как точки с направлением. Это математическая модель системы 3-х тел. Невозможно предсказать их траектории на длительном промежутке времени. К чистой математической модели мы добавляем физическое ее воплощение и возникает масса не учитываемых и не прогнозируемых параметров, такие как неровности поля, налипший местами снег, неточности механического управления и т.д. Эти новые параметры делают невозможным предсказание поведение роботов даже на минуту вперед.Мы можем только наблюдать за развитием и внезапными изменениями отношений между ними.Мы фиксируем на видео процесс непрерывных вычислений, хаотично меняющих взаимные траектории шаров. Создав систему, мы не можем управлять ее. Мы можем только выступать в роли физических погрешностей, влияющих на текущую математическую операцию, при этом мы не можем знать, как именно мы влияем на эти вычисления. Мы отказываемся от контроля и мы признаем невозможность контроля. Эта аутичная система, замкнутая на постоянное вычисление самой себя.
в проекте использована композиция,созданная на основе нот, изображённых на триптихеИеронима Босха «Сад радостей земных»Ансамбль "Vox Vulgaris"Юн Кулльблад (ударные, колёсная лира)
Проект реализован при поддержке: фонда Дмитрия Зимина "Династия"иУральского филиала Государственного центра современного искусстваКуратор: Светлана Усольцева
Программирование:Денис Перевалов
Научные консультанты:
Виктор ОрловСПбГУ профессор, доктор физико-математических наукВладимир Сурдинкандидат физико-математических наукдоцент ГАИШ имени Штернберга МГУКомпьютерное моделирование задачи многих тел:Евгений БутиковСПбГУ профессор кафедры общей физики
текст читает Пётр Винокуров
Благодарим за помошь в реализации проекта:
Романа ПлотниковаМарину СоколовскуюАлису ПрудниковуКсению ЖиделевуДарью ПархоменкоСтанислава СтаньковскогоАртёма Корзухина
Куда бегут собаки2013 год
where-dogs-run.livejournal.com
Куда бегут собаки? - ArtElectronics.ru
«Куда бегут собаки» – творческое объединение. Влад Булатов, Наталья Грехова, Ольга Иноземцева, Алексей Корзухин работают с 2000 года в Екатеринбурге. Они делают видеоинсталляции, кинетические скульптуры, технологические перформансы, играют со штампами поп-культуры и мифологическими сюжетами. Их работы «Лица запаха» и «Поля 2.1» сегодня входят в антологии по технологическому искусству.
АЭ: Как появилась группа «Куда бегут собаки»?
КБС: Спонтанно. Мы познакомились не все одновременно, у каждого из участников своя история. У нас не было представления об актуальном тогда искусстве, мы не знали ничего ни об арт-институциях, ни о кураторах, ни о том, что мы не одни. И мы были совершенно неграмотны. В первых своих выставках, сами того не подозревая, мы повторили все, что уже было сделано после Дюшана, только в комичном виде.
АЭ: В самом деле?
КБС: Когда мы учились, история искусств заканчивалась Малевичем. Однако мы не хотели делать то, чему нас учили. Мы писали картины, но нас тошнило от этого. Мы понимали, что живописью нам заниматься неинтересно. Так появилась наша первая акция. Нам казалось, что мы делаем нечто небывалое. Это был такой кайф!
АЭ: Что это было?
КБС: Мы заперли свои картины в подвале с двойными стенами, которые выкрасили в черный цвет. Напустили механических тараканов и всякой нечисти. Позвали танцовщиц, которые бились друг с другом нагишом, хаус-диджея, классическую скрипачку. Кто-то читал стихи. Это было ужасно, но мы были счастливы. Акция называлась «Лабиринт». Потом мы делали примитивные электромеханические организмы и населяли ими пространства.
Вместе с тем, мы увлеклись видео - как средой, создаваемой при помощи устройства и способной взаимодействовать с другими устройствами. В общем, мы стали использовать самые разные технологии и материалы...
АЭ: Не исключено, что вам уже надоело рассказывать историю названия группы, я не знаю, стоит ли задавать этот вопрос...
КБС: Есть зороастрийская легенда о том, что, когда души умерших собак — тысячи кобельков и сучек — пересекают мост Чинват, они превращаются в живых выдр, которые плывут по воде и начинают новую жизнь. Выдры — священные животные. Но насчет того, какое именно это имеет отношение к названию нашей группы, у каждого из нас своя версия, поэтому мы никогда не можем внятно ответить на этот вопрос.
АЭ: Однажды я с удивлением узнала, что у вас в группе два программиста и два художника. Это правда?
КБС: Нет, это неправда, мы, все четверо, художники. Для некоторых проектов мы приглашали программиста, но в группу он никогда не входил.
АЭ: А вы не боитесь в стремлении быть необычными стать похожими на художников, которые тоже стремятся быть необычными?
КБС: Нет, мы вовсе не стремимся быть необычными. Сначала надо понять кто такие обычные и где они живут.
АЭ: Вы думаете о зрителях?
КБС: Хорошо, что они есть, особенно - когда они внимательны. Мы очень редко их видим. Очень интересно наблюдать за ними на выставках. Впрочем, люди и без выставок интересны.
АЭ: Есть ли душа у механизмов?
КБС: Не будем отрицать, что мы когда-то такое говорили... Сейчас, наверное, мы бы сказали, что в любом устройстве содержится текст, послание, заложенное в его электросхеме. Если устройство работает, значит, текст, который в нем скрыт, точен и ясен. Если же не работает или работает плохо, то текст, вероятно, слаб и мутен. Мы пытаемся переводить тексты в электросхемы и электросхемы в тексты. Мы называем это «символизм в электросхемах», потому что наши трактовки очень субъективны. Иногда кажется, что стоит только найти точные слова, выражающие твой замысел, а потом верно перевести их в электросхему — и ты сможешь сделать что угодно, то, чего еще не было.
АЭ: Что вы думаете о международных фестивалях искусств?
КБС: Нам трудно говорить о международных фестивалях в целом. Участие в международных проектах, как правило, очень интересно. Это позволяет не только увидеть воочию, что именно сейчас происходит в мире, но и посмотреть на свою работу в этом контексте.
Например, мы были на фестивале в Словении (фестиваль KIBLIX 2012 в Мариборе – прим. ред.) и случайно познакомились там с дедушкой Сильвестром. Он водил нас по живописным местам города, мы много говорили на смешении славянских языков и отлично друг друга понимали. Конечно, мы пригласили его на фестиваль, и едва он вошел, к нему бросились журналисты – он оказался известным словенским художником. Он очень внимательно все оглядел, потом поговорил с прессой. А после выставки показал нам свою работу – огромную скульптуру на площади, изображающую движение планет по орбитам. Его свободное сознание оказалось очень близким нам, хотя он не использовал каких-то особых новых технологий. Его свободное сознание, к которому мы постоянно стремимся, его раскованность в хорошем смысле этого слова... Каждый художник конструирует будущее так как видит его он, и у всех оно получается разным, и никто не настаивает на собственной версии. Это творчество в разных плоскостях.
Мы попросили членов группы «Куда бегут собаки» прокомменировать свои работы. Вот что у них получилось.
Интерактивная видеоинсталляция «Осадок», 2012
На экране - медленный бесконечный поток картошки. Когда зритель поворачивается, чтобы уйти, картофелины смотрят ему вслед (они словно провожают уходящего). Заметит этот взгляд лишь внимательный зритель.
Восход, 2012

Куда бегут собаки. Восход, 2012
Видео. На фоне алого солнца — четыре всадника. Картинка напоминает кадр из фильма «Неуловимые мстители». Звучит песня: «…Мы ведь целую вечность собираемся жить...». Приблизившиеся фигуры всадников оказываются монстрами или мутантами.
Лица запаха, 2012

Куда бегут собаки. Лица запаха, 2012
Этот механизм - еще один «костыль» для памяти, он заведомо ущербен и смешон, но в точности соответствует требованиям тотальной визуализации, в которой все мы сейчас существуем. Это проект о невозможности восстановить в памяти запах, не почувствовав его еще раз. Здесь предлагается абсурдный способ запоминания запаха через его визуальный образ. Информация с датчиков-газоанализаторов обрабатывается компьютером и переводится в данные «фоторобота». Человек, стоящий перед нюхательными трубками, видит лицо своего запаха.
Бабушка - Мандельброт, 2011
 Бабушка вяжет переведенное в схему для вязания множество Мандельброта. Бабушка ограничивает пустоту.
Бабушка вяжет переведенное в схему для вязания множество Мандельброта. Бабушка ограничивает пустоту.
«Множество Мандельброта можно назвать границей вылета в бесконечность. Берется точка недалеко от нуля, и ее координаты, x и y, подставляются в два простых уравнения. Получаются другие два числа, координаты новой точки, - и пропускаются через то же самое уравнение, и так далее. Таких структур, как множество Мандельброта, в природе очень много. Например кровеносная система, береговая линия... Нам интересно здесь отношение к неопределимой границе: стоит ли оставаться внутри и традиционно краситься в черный цвет или лучше оказаться снаружи, при этом точно зная, что придется улететь в бесконечность. Или быть на границе и бесконечно уподобляться самому себе». Эти слова, просто и точно описывающие проект, принадлежат Евгению Пригородову - математику и программисту, другу художников.
Поля-2, 2012
Эта интерактивная видеоинсталляция первоначально была создана для Уральского наноцентра.
Две камеры с разных ракурсов проецируют на два экрана изображение стеклянной чаши с магнитной жидкостью. Магнитная жидкость – это особый наноматериал, состоящий из магнитных частиц. Под влиянием магнитного поля жидкость образует выпуклости. Динамика движения жидкости никогда не повторяется. Внутри цилиндрического подиума под стеклянной чашей находится собранный из постоянных магнитов «глаз»; система двигателей позволяет глазу «моргать», вращаться, подниматься на поверхность или опускаться. Магнитные поля деформируют поверхность жидкости и на ней создается рельефное изображение глаза. Если к чаше приближается зритель, глаз всплывает на поверхность и перемещается вслед за зрителем по поверхности чаши. Когда зритель останавливается, глаз тоже останавливается и начинает моргать.
Этот проект мы описывали в рассказе о выставке «The Soft Control» в Мариборе в 2012 году – прим. ред.
Порнопедальные сны-2, 2008

Куда бегут собаки. Порнопедальные сны-2, 2008
«Это наша старая работа, которую мы слегка обновили для грядущей выставки. Ползающие мясорубки. Ползают очень быстро. Недавно одна спрыгнула со стула (хотя была выключена), кинулась на человека - своего создателя - и боднула его больно в ногу. Сначала мы сделали одну мясорубку. Она была раненая, ползала очень медленно и тяжело. Подползала к кому-нибудь и пыталась придавить. Была она очень большая и чугунная. Следующие четыре мясорубки были поменьше, но еще тоже чугунные. А эти маленькие китайские алюминиевые – очень быстрые, и их уже восемь. Так мы заметили, что мясорубки мельчают, зато их становится больше».
Переносная мини-таможня, 2008

Куда бегут собаки. Переносная мини-таможня, 2008
С виду – ящик с крышкой, открываете – и звучит шарманка. Это деревянный механический театр, только фигурки – таможенники и пассажиры, путешествующие поездом. Все проходит как при осмотре документов на границе: пассажиры предъявляют паспорта, таможенники их проверяют…
Сам по себе феномен таможни ассоциирует с унижением и неуверенностью в себе. Нельзя быть до конца уверенным в том, что случайно не везёшь с собой что-то запрещённое, поэтому человек обычно слегка нервничает и надеется, что всё пройдёт гладко. Но обладателю переносной мини-таможни доступна терапия, благодаря своей игрушке он может испытывать чувство неуверенности в микродозах. Он постоянно, как в случае постепенного привыкания к яду повышает ежедневную дозу созерцания. И возможно, со временем владелец ящика станет нечувствителен к реальным ощущениям, связанным с таможенным контролем.
artelectronics.ru
как устроен рабочий процесс арт-группы «Куда бегут собаки» — T&P
Куда бегут собаки — это не вопрос, а название арт-группы из Екатеринбурга. Художники Влад Булатов, Наталья Грехова, Ольга Иноземцева, Алексей Корзухин работают вместе с 1999 года и создают кинетические скульптуры, объекты, инсталляции, видео и акции, обращенные к масштабному научному эксперименту, образам оптических и языковых иллюзий, утопиям новых технологий. T&P узнали, как «Куда бегут собаки» организовывают свой рабочий процесс.
У нас есть временная мастерская, которую нам дает ГЦСИ в рамках программы художественных резиденций-студий Уральского филиала ГЦСИ «Мастерская», где много всякого железа, проводочков, плесени и тому подобного. Это старое очень красивое здание в предаварийном состоянии, которое хотят закрыть на реконструкцию.
В хорошей мастерской должно быть все: инструменты, измерительное оборудование, компьютеры. Стартовые параметры простые — тепло, свет, вода, электричество. В идеале, в мастерской должно быть спальное место. Еще хорошо, когда рядом есть строительный хозяйственный магазин, лучше круглосуточный. У нас была мастерская одно время рядом с магазином электроники, поэтому мы вообще никуда не ходили, остальные детали нам приходили доставкой в мастерскую.
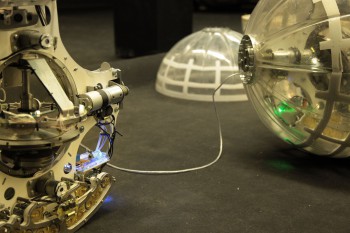
Инсталляцию «Триалог» мы делали год. Изначально у нас была следующая задача: мы хотели в качестве неподвижной камеры зафиксировать движение шаров и на него никак не влиять. Нам нужно было создать фильм об автономной системе, живущей своей жизнью, поэтому мы сделали роботов. Дальше мы стали думать, как они должны взаимодействовать, чтобы эта система могла постоянно изменять свои отношения изнутри. И пришли к выводу, что они должны взаимодействовать по закону аналогичному закону гравитации. Шары знают положение друг друга в пространстве и постоянно вычисляют исходя из этого, взаимные траектории. Поэтому постоянно меняется картина движения.
Работа разбивается на этапы: проектируются все детали, чертежи отдаются в производство, делаются печатные платы, подбираются электронные компоненты. Платы делаются отдельно, после чего собирается вместе, программируется и тестируется.
Алексей разработал сначала всю схематехнику, все чертежи. Затем часть деталей, которую нельзя купить в готовом виде, была отдана в производство (токарные, фрезерные работы, лазерная резка). В данном случае, это были практически все детали кроме электроники. Потом мы все это собирали, паяли и конфигурировали. Пока мы разбирались со всем, что касается материи, мы поняли, что у нас будет настолько сложная вещь, что нам нужен профессиональный программист. Денис Перевалов работал над этим проектом в качестве разработчика программного обеспечения. Он сначала тестировал отдельные составляющие системы (двигатель, gps), а потом перешел к программированию всей системы.
Что касается 3D моделирования, если раньше мы чертили все в 3D Max, то в какой-то момент это перестало нас устраивать, и пришлось перейти в машиностроительные программы типа Inventor, которые выдают ГОСТовские чертежи.
У нас были свои задачи по фильму: зрителю не должно было быть очевидно, что это роботы. Есть функция, но нет самого предмета технологической гордости. Нет чего-то, что вообще выносит на поверхность робототехнику, есть просто отношение. Нам нужен был правильный характер движения, мы этого очень долго добивались в тестовом режиме, потому что шары должны были красиво кататься. На это ушло масса времени и сил, так год и прошел. Обычно роботы функциональны, у нас же была идея аннигиляции робота, убийство робота, ноль функций, кроме взаимных вычислений, ноль в плане взаимодействия со зрителем, потому что интерактивной функции тоже нет.
Для экспонирования шаров в выставочном пространстве добавилась интерактивная составляющая и шары функционировали в другом режиме, зрители могли назначать на терминале массу шара (заменять собой поле и снег), тем самым изменяя параметры системы. Но зритель по прежнему не мог взаимодействовать и управлять. Не мог сочувствовать или бояться, мог только наблюдать.
В процессе работы нас страшно зацепило, что существует астрономическая задача N тел и она все еще не решена. Мы живем в таком бодром техническом времени и ученые все еще не могут просчитать падение метеорита. А систему трех тел: Земля, Луна и Солнце можно просчитать только на короткое время, потом начинаются страшные погрешности. Тогда нас эта глобальная неопределенность поразила. В итоге, мы сняли фильм об ученых, которые занимаются задачей трех тел всю жизнь. Фильм пока не смонтирован, но отснято большое количество материала. Но есть маленький научно-популярный фильм о задаче трех тел, где Владимир Сурдин кратко рассказывает об этой проблеме.
Нам все время не хватает технических возможностей, как бы смешно это ни звучало. Мы вроде не следим за новинками, но когда пытаемся достичь своей цели, вроде элементарного плавного движения шаров, выясняется, что нам нужны чуть ли не последние разработки, и даже их не всегда не хватает. В каждом проекте мы чувствуем этот потолок. И этот технологический предел не только российский, но глобальный. У нас есть много проектов, которые до сих пор не реализованы по техническим причинам.
theoryandpractice.ru
Куда бегут собаки (КБС)
 Творческое объединение «Куда бегут собаки» образовано в 2000 году в Екатеринбурге. Художники создают кинетические скульптуры, объекты, инсталляции, видео и акции, обращенные как к спонтанным телесным переживаниям и мифологическим повествованиям, так и к образам оптических и языковых иллюзий, уповающих на технические достижения утопий. Активный участник различных биеннале и выставок современного искусства в России и за рубежом.
Творческое объединение «Куда бегут собаки» образовано в 2000 году в Екатеринбурге. Художники создают кинетические скульптуры, объекты, инсталляции, видео и акции, обращенные как к спонтанным телесным переживаниям и мифологическим повествованиям, так и к образам оптических и языковых иллюзий, уповающих на технические достижения утопий. Активный участник различных биеннале и выставок современного искусства в России и за рубежом.
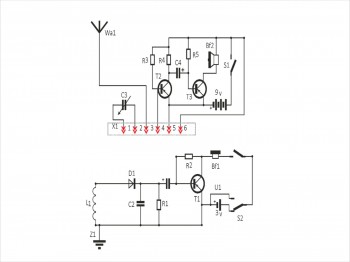
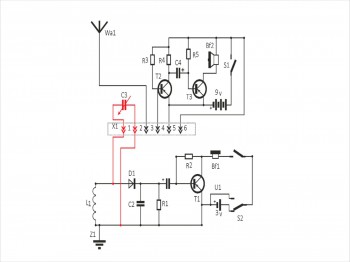
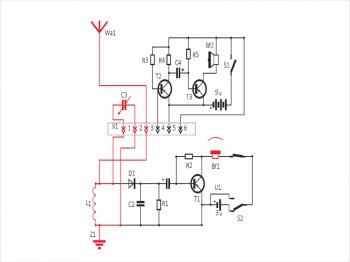
Символизм в электросхемах.
Любой холодильник, телевизор или фен несет в себе текст. Текст этот, на данный момент, не известен пользователю. То есть, мы каждый день имеем дело с закрытыми посланиями , несущими в себе все, что угодно. И обратная ситуация: создавая что-либо электро-механическое или роботизированное, ты, на самом деле, не знаешь смысл и предназначение задуманного. Ты не понимаешь, что за текст ты создал.Мы попытались разобраться в этом, используя давно устоявшуюся систему графических символов в электро- схемах. Эти символы отображают не только функции, выполняемые означенным устройством, но и процессы, связанные с этим. Например, антенна обозначается как дерево с ветвями вверх, земля — через вертикальный столбик, воткнутый в три горизонтали и т.д.Мы попытались расшифровать эти символы и создать устройства, адекватные зашифрованным в них текстам. Мы перевели стихи в графические символы электросхем ( Лорка, Хармс, Пушкин, Хлебников ), и собрали по этим схемам устройства. В результате, » Пророк» Пушкина оказался радиоприемником с головным телефоном, стишок Хармса о Хлебникове — мультивибратором, » Лунные три ступени» Лорки — детекторным приемником и так далее. Мы обнаружили, что функции получившихся устройств, связаны с содержанием стихов, положенных в основу их электросхем. Мы поняли, что если суметь абсолютно точно описать словами то, что ты стремишься создать, то останется только перевести в графическую схему этот текст и собрать его в материале. Мы продолжаем эту работу.
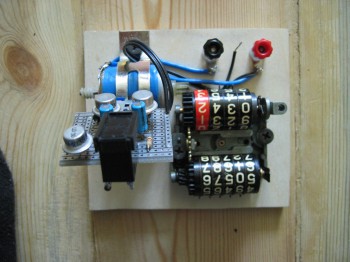
Куда бегут собаки (КБС). Символизм в электросхемах. 2013. Видео (3.04 мин). © Aвторы / Where dogs run (WDR). Symbolism in electroschemes. 2013. Video (3.04 min). © Authors
Куда бегут собаки (КБС). Символизм в электросхемах. 2013. Видео (3.04 мин). © Aвторы / Where dogs run (WDR). Symbolism in electroschemes. 2013. Video (3.04 min). © Authors
Куда бегут собаки (КБС). Символизм в электросхемах. 2013. Видео (3.04 мин). © Aвторы / Where dogs run (WDR). Symbolism in electroschemes. 2013. Video (3.04 min). © Authors

Куда бегут собаки (КБС). Символизм в электросхемах. 2013. © Aвторы / Where dogs run (WDR). Symbolism in electroschemes. 2013. © Authors

Куда бегут собаки (КБС). Символизм в электросхемах. 2013. © Aвторы / Where dogs run (WDR). Symbolism in electroschemes. 2013. © Authors

Куда бегут собаки (КБС). Символизм в электросхемах. 2013. © Aвторы / Where dogs run (WDR). Symbolism in electroschemes. 2013. © Authors

Куда бегут собаки (КБС). Символизм в электросхемах. 2013. © Aвторы / Where dogs run (WDR). Symbolism in electroschemes. 2013. © Authors
Куда бегут собаки (КБС). Символизм в электросхемах. 2013. © Aвторы / Where dogs run (WDR). Symbolism in electroschemes. 2013. © Authors
www.kandinsky-prize.ru
Почему бегут собаки?
Камчатская гонка на собачьих упряжках «Берингия-2018» приближается к финишу, который назначен на середину апреля в чукотском селе Марково. Все перипетии этой самой длинной в истории гонки уже скоро станут предметом воспоминаний, разбора «полетов»: как шли-бежали, какой этап был самым трудным, каким был снег и как пурговали два дня подряд. Как ночевали в тундре, вырыв в снегу ямы и постелив в них карематы и оленьи шкуры. Как еще в первой половине пути «потеряли» товарищей, которые сошли с дистанции, сохраняя своих четвероногих партнеров по упряжке.
Всю продолжительную гонку лидеры подпирали друг друга: Валентин ЛЕВКОВСКИЙ, Андрей СЕМАШКИН, москвич Вячеслав ДЕМЧЕНКО, самая молодая участница и новичок «Берингии» Алиса ИЩЕНКО. Имена героев известны, а вот как бежалось хвостатым участникам? Они нам об этом не расскажут. И даже их хозяева не могут доподлинно объяснить - почему собаки так любят гонку, почему так выкладываются ради победы своего хозяина?
Об этом накануне мы беседовали с завсегдатаем и многократным победителем «Берингии» Андреем Семашкиным.
- Андрей, в любом деле главное - это команда. Как формируете свою упряжку?
- Я, как правило, беру однопометников, либо молодых собак одного возраста. Они равные по своим рабочим качествам, знают друг друга по запаху и по крови. Еще в щенячьем возрасте, когда они играли вместе и пробовали свои зубы, они уже установили определенную иерархию. И уже к ним я подставляю опытных собак. В процессе длительных тренировок вымеряю, смотрю, насколько хорошо каждая из них держит темп или, наоборот, быстро устает. С опытом начинаешь понимать определенные моменты, много нюансов приходится учитывать при формировании команды.
- Собаки, которые больше месяца работают вместе, ссорятся друг с другом? Кто у них вожак?
- Всякое бывает, но в любом случае главным вожаком в этой стае являюсь я. И они меня должны слушаться. Есть такие сильные по характеру собаки, которых порой приходится ломать, чтобы она осталась в команде, потому что у нее хорошие качества. У меня была собака-волк «Смелый», который никак не поддавался моей воле. Приходилось бороться до крови, вон сколько шрамов у меня, но в итоге мы поладили, это изумительная рабочая собака. В любом случае, с собаками нужно работать и любить их.
- Вы выходите на самую длинную в истории «Берингии» гонку. Какую-то стратегию для себя выстраиваете?
- Мы вначале хотели сделать линейную гонку, когда каждый для себя может регулировать порядок: дневной километраж, время отдыха. Но это очень тяжело. Было принято решение, что она будет этапная: много длительных переходов, и нужен полноценный отдых и нам, и собакам. Будем заходить в поселки, будут выходные, чтобы все пришли к финишу.
- В какой момент у вас и собак открывается второе дыхание?
- Где-то к середине гонки, когда ты начинаешь более активно работать. Я никогда не тороплюсь сразу, я придерживаю, притормаживаю собак. Неизвестно ведь, какая дорога, какой снег впереди. Важно, чтобы собаки себя не травмировали. В этом смысле у меня есть печальный опыт, в 2011 году, когда мы шли 130-километровый этап, снег растаял, и пришлось менять путь. Несколько моих собак сильно порезали лапы, у них ослаб иммунитет; чтобы сберечь свою команду, я снялся с гонки.
- Собаки ждут гонку, чувствуют ее? У них просыпается азарт?
- Очень хорошо чувствуют. Они заряжены на нее и готовы на длительные дистанции. Но это большой вопрос: «Почему собака бежит?». Мы сами себе задаем его. Но она бежит в стае, и работает четко и ровно. При этом даже если случается сильная пурга, собака находит старый след, и ты знаешь, что она тебя вытянет и выведет домой обязательно. Это в инстинктах - работать в команде.
- Сколько времени даете собаке на отдых после гонки?
- Максимум два-три дня. Когда она идет на гонке, у нее активно работает сердце, сильное кровообращение. И если собака потом резко сбавляет нагрузку, она просто засыпает и не просыпается.
- Как определяется победитель каждого этапа? По собаке, нарте?
- По носу собаки, которая первой пересекла финишную линию.
Фото Виктора ГУМЕНЮКА.
Лариса ЛАРИНА.
Журнал "Дальневосточный капитал", апрель, 2018 год.
Источник
www.ap7.ru
Куда бегут собаки (КБС)
Творческое объединение «Куда бегут собаки» образовано в 2000 году в Екатеринбурге. Художники создают кинетические скульптуры, объекты, инсталляции, видео и акции, обращенные как к спонтанным телесным переживаниям и мифологическим повествованиям, так и к образам оптических и языковых иллюзий, уповающих на технические достижения утопий. Активный участник различных биеннале и выставок современного искусства в России и за рубежом.
Триалог
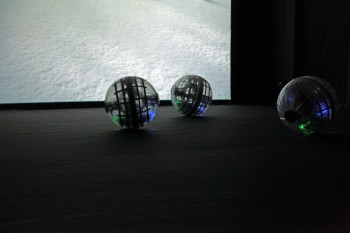
Три белых шара в снежном поле. Шары – роботы, способные двигаться автономно и согласованно. Они обмениваются информацией о взаимном положении в пространстве и используют в качестве уравнения движения закон, качественно аналогичный закону гравитации. Шары притягиваются и отталкиваются в зависимости от расстояния между ними и массы их тел. Они движутся не как материальные точки, готовые повернуть в любой момент, а как точки с направлением. Это математическая модель системы 3-х тел. Невозможно предсказать их траектории на длительном промежутке времени. К чистой математической модели мы добавляем физическое ее воплощение и возникает масса не учитываемых и не прогнозируемых параметров, такие как неровности поля, налипший местами снег, неточности механического управления и т.д. Эти новые параметры делают невозможным предсказание поведение роботов даже на минуту вперед.Мы можем только наблюдать за развитием и внезапными изменениями отношений между ними.Мы фиксируем на видео процесс непрерывных вычислений, хаотично меняющих взаимные траектории шаров. Создав систему, мы не можем управлять ею. Мы можем только выступать в роли физических погрешностей, влияющих на текущую математическую операцию, при этом мы не можем знать, как именно мы влияем на эти вычисления. Мы отказываемся от контроля и мы признаем невозможность контроля. Эта аутичная система, замкнутая на постоянное вычисление самой себя.

Куда бегут собаки (КБС). Триалог. 2012. Видео, Роботы-шары, компьютеры, камеры, программное обеспечение. Размеры: 3 шара диаметром 61 см. © Фонд «ZAART» / Where dogs run (WDR). Trialogue. 2012. Videos, Robots-balls,, computers, cameras, software. Dimensions: 3 balls of diameter 61 cm. © «ZAART» Foundation

Куда бегут собаки (КБС). Триалог. 2012. Видео, Роботы-шары, компьютеры, камеры, программное обеспечение. Размеры: 3 шара диаметром 61 см. © Фонд «ZAART» / Where dogs run (WDR). Trialogue. 2012. Videos, Robots-balls,, computers, cameras, software. Dimensions: 3 balls of diameter 61 cm. © «ZAART» Foundation

Куда бегут собаки (КБС). Триалог. 2012. Видео, Роботы-шары, компьютеры, камеры, программное обеспечение. Размеры: 3 шара диаметром 61 см. © Фонд «ZAART» / Where dogs run (WDR). Trialogue. 2012. Videos, Robots-balls,, computers, cameras, software. Dimensions: 3 balls of diameter 61 cm. © «ZAART» Foundation

Куда бегут собаки (КБС). Триалог. 2012. Видео, Роботы-шары, компьютеры, камеры, программное обеспечение. Размеры: 3 шара диаметром 61 см. © Фонд «ZAART» / Where dogs run (WDR). Trialogue. 2012. Videos, Robots-balls,, computers, cameras, software. Dimensions: 3 balls of diameter 61 cm. © «ZAART» Foundation
Куда бегут собаки (КБС). Триалог. 2012. Видео, Роботы-шары, компьютеры, камеры, программное обеспечение. Размеры: 3 шара диаметром 61 см. © Фонд «ZAART» / Where dogs run (WDR). Trialogue. 2012. Videos, Robots-balls,, computers, cameras, software. Dimensions: 3 balls of diameter 61 cm. © «ZAART» Foundation

Куда бегут собаки (КБС). Триалог. 2012. Видео, Роботы-шары, компьютеры, камеры, программное обеспечение. Размеры: 3 шара диаметром 61 см. © Фонд «ZAART» / Where dogs run (WDR). Trialogue. 2012. Videos, Robots-balls,, computers, cameras, software. Dimensions: 3 balls of diameter 61 cm. © «ZAART» Foundation
Куда бегут собаки (КБС). Триалог. 2012. Видео, Роботы-шары, компьютеры, камеры, программное обеспечение. Размеры: 3 шара диаметром 61 см. © Фонд «ZAART» / Where dogs run (WDR). Trialogue. 2012. Videos, Robots-balls,, computers, cameras, software. Dimensions: 3 balls of diameter 61 cm. © «ZAART» Foundation

Куда бегут собаки (КБС). Триалог. 2012. Видео, Роботы-шары, компьютеры, камеры, программное обеспечение. Размеры: 3 шара диаметром 61 см. © Фонд «ZAART» / Where dogs run (WDR). Trialogue. 2012. Videos, Robots-balls,, computers, cameras, software. Dimensions: 3 balls of diameter 61 cm. © «ZAART» Foundation
www.kandinsky-prize.ru
Куда бегут собаки (КБС)
Творческое объединение «Куда бегут собаки» образовано в 2000 году в Екатеринбурге. Художники создают кинетические скульптуры, объекты, инсталляции, видео и акции, обращенные как к спонтанным телесным переживаниям и мифологическим повествованиям, так и к образам оптических и языковых иллюзий, уповающих на технические достижения утопий. Активный участник различных биеннале и выставок современного искусства в России и за рубежом.
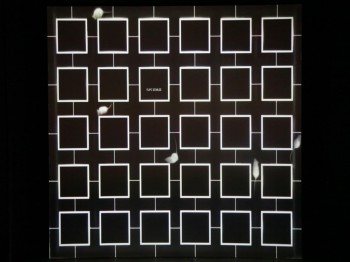
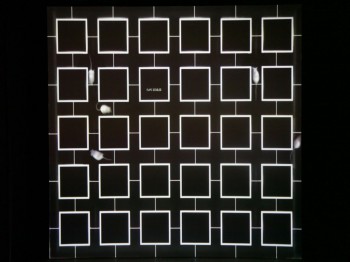
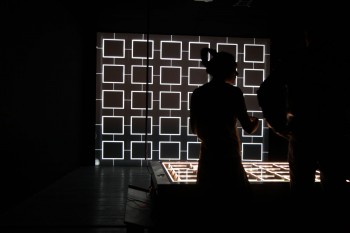
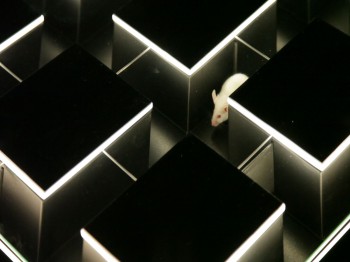
1,4…19.
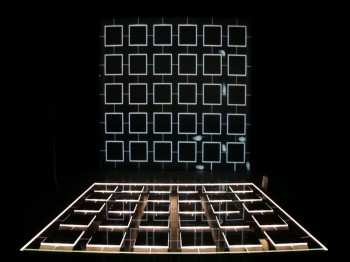
Мы используем привычную метафору мыши в лабиринте для изучения механизмов формирования реальности. Мышь подвергается жесткому воздействию своей собственной нереализованной реальности. Мы наблюдаем, как именно, она строит свою действительность в этих условиях.Мышь, проходя по лабиринту , на каждом перекрестке выбирает лишь один из вариантов, все остальные остаются нереализованными. Мы видим не только реализованный путь, но и упущенные возможности в виде виртуальных мышей на проекции. Виртуальные мыши действуют самостоятельно и непредсказуемо. На каждом перекрестке мышь плодит виртуальные сущности. В момент, когда виртуальная мышь направляется на встречу реальной, — в лабиринте между ними выдвигается стенка. Виртуальные мыши могут заполнить почти весь лабиринт и ограничить пространство реальной мыши до предельного минимума. Мышь, запертая между стенками, перестает создавать свои виртуальные копии. Не имея выбора -она не теряет возможностей.Таким образом, нереализованные возможности мыши, формируют траекторию и объем ее жизненного пространства. События, происходящие с реальной мышью, разворачиваются в плоскости лабиринта. События, происходящие с виртуальными мышами, разворачиваются во всех направлениях. Они одновременно и прошедшие и будущие события для нашей мыши.Простая структура лабиринта сокращает количество возможных состояний мыши, что позволяет нам моделировать нереализованные варианты ее будущего и влиять на ее настоящее.
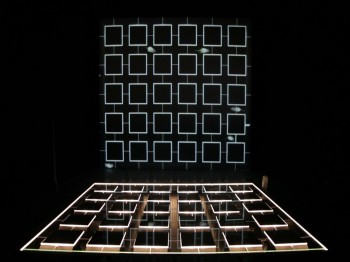
Куда бегут собаки (КБС). 1,4…19. 2014. Интеракивная инсталляция с живой мышью. Роботизированный Бокс-лабиринт, проекция, компьютер, камера, программное обеспечение, металл, стекло, механические части, электронные компоненты. Размеры: бокс-лабиринт 1400х1800х2600. © Фонд «ZAART» / Where dogs run (WDR). 1.4 … 19. 2014.interactive installation with live mouse. Robotic Boxing maze, projection, computer, camera, software, metal, glass, mechanical parts and electronic components. Dimensions: box maze 1400х1800х2600. © «ZAART» Foundation
Куда бегут собаки (КБС). 1,4…19. 2014. Интеракивная инсталляция с живой мышью. Роботизированный Бокс-лабиринт, проекция, компьютер, камера, программное обеспечение, металл, стекло, механические части, электронные компоненты. Размеры: бокс-лабиринт 1400х1800х2600. © Фонд «ZAART» / Where dogs run (WDR). 1.4 … 19. 2014.interactive installation with live mouse. Robotic Boxing maze, projection, computer, camera, software, metal, glass, mechanical parts and electronic components. Dimensions: box maze 1400х1800х2600. © «ZAART» Foundation
Куда бегут собаки (КБС). 1,4…19. 2014. Интеракивная инсталляция с живой мышью. Роботизированный Бокс-лабиринт, проекция, компьютер, камера, программное обеспечение, металл, стекло, механические части, электронные компоненты. Размеры: бокс-лабиринт 1400х1800х2600. © Фонд «ZAART» / Where dogs run (WDR). 1.4 … 19. 2014.interactive installation with live mouse. Robotic Boxing maze, projection, computer, camera, software, metal, glass, mechanical parts and electronic components. Dimensions: box maze 1400х1800х2600. © «ZAART» Foundation
Куда бегут собаки (КБС). 1,4…19. 2014. Интеракивная инсталляция с живой мышью. Роботизированный Бокс-лабиринт, проекция, компьютер, камера, программное обеспечение, металл, стекло, механические части, электронные компоненты. Размеры: бокс-лабиринт 1400х1800х2600. © Фонд «ZAART» / Where dogs run (WDR). 1.4 … 19. 2014.interactive installation with live mouse. Robotic Boxing maze, projection, computer, camera, software, metal, glass, mechanical parts and electronic components. Dimensions: box maze 1400х1800х2600. © «ZAART» Foundation
Куда бегут собаки (КБС). 1,4…19. 2014. Интеракивная инсталляция с живой мышью. Роботизированный Бокс-лабиринт, проекция, компьютер, камера, программное обеспечение, металл, стекло, механические части, электронные компоненты. Размеры: бокс-лабиринт 1400х1800х2600. © Фонд «ZAART» / Where dogs run (WDR). 1.4 … 19. 2014.interactive installation with live mouse. Robotic Boxing maze, projection, computer, camera, software, metal, glass, mechanical parts and electronic components. Dimensions: box maze 1400х1800х2600. © «ZAART» Foundation

Куда бегут собаки (КБС). 1,4…19. 2014. Интеракивная инсталляция с живой мышью. Роботизированный Бокс-лабиринт, проекция, компьютер, камера, программное обеспечение, металл, стекло, механические части, электронные компоненты. Размеры: бокс-лабиринт 1400х1800х2600. © Фонд «ZAART» / Where dogs run (WDR). 1.4 … 19. 2014.interactive installation with live mouse. Robotic Boxing maze, projection, computer, camera, software, metal, glass, mechanical parts and electronic components. Dimensions: box maze 1400х1800х2600. © «ZAART» Foundation

Куда бегут собаки (КБС). 1,4…19. 2014. Интеракивная инсталляция с живой мышью. Роботизированный Бокс-лабиринт, проекция, компьютер, камера, программное обеспечение, металл, стекло, механические части, электронные компоненты. Размеры: бокс-лабиринт 1400х1800х2600. © Фонд «ZAART» / Where dogs run (WDR). 1.4 … 19. 2014.interactive installation with live mouse. Robotic Boxing maze, projection, computer, camera, software, metal, glass, mechanical parts and electronic components. Dimensions: box maze 1400х1800х2600. © «ZAART» Foundation
Куда бегут собаки (КБС). 1,4…19. 2014. Интеракивная инсталляция с живой мышью. Роботизированный Бокс-лабиринт, проекция, компьютер, камера, программное обеспечение, металл, стекло, механические части, электронные компоненты. Размеры: бокс-лабиринт 1400х1800х2600. © Фонд «ZAART» / Where dogs run (WDR). 1.4 … 19. 2014.interactive installation with live mouse. Robotic Boxing maze, projection, computer, camera, software, metal, glass, mechanical parts and electronic components. Dimensions: box maze 1400х1800х2600. © «ZAART» Foundation
www.kandinsky-prize.ru



















